Lipid-coated microbubbles could swim (very) fast under
ultrasound
Buckling is the key
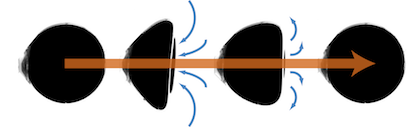
Microbubbles can achieve significant net displacement
through reproducible, non-destructive cycles of deflation
and re-inflation, induced by an ultrasonic wave. Our
numerical modeling supported by experiments showed that
well-designed microbubbles could swim at speeds in the m/s
range, enabling efficient motion within the bloodstream.
(Movie by M. Mokbel)
Collapse of lipidic ultrasound contrast agents under
high-frequency compressive loading has historically been
interpreted by the vanishing of surface tension. In
contrast, buckling of elastic shells is known to occur when
the costly compressive stress is released by bending. Using
quasi-static compression experiments on lipid shells, we
analyzed the buckling events within the framework of
classical elastic buckling theory and attempted to make
these two views compatible.
Joint studies with D. Holmes (Boston) and S.Aland
(Freiberg)
We have modeled the buckling dynamics of elastic shells,
paving the way for the controlled use of these objects to
generate small-scale flows for applications such as mixing,
or the propulsion and control of immersed microrobots.
We were interested in the initiation of buckling, modeling
the process as the growth of the defect where the buckling
was initiated.
We have also characterized how the shell oscillates in its
buckled geometry (see video), and explained why it does so
at a much lower frequency than in the spherical
configuration.
While existing models were focusing on shells made of
isotropic incompressible material, we have developed a model
that introduces compressible material, that are possibly
anisotropic in the radial direction. The results explain
part of the apparent dependency of material properties on
shell radius, that is seen on most experiments on Ultrasound
Contrast Agents.
The number of folds and the residual volume of deflated
beach balls are functions of their mechanical properties. We
have explored these relationships by means of simple
experiments with commercial balls. The underlying laws apply
to micrometric objects like cells, ultrasonic contrast
agents, colloids, etc.
A spherical shell that swims thanks to sound waves
Proof of concept macroscopic experiment
Powering microrobots inside a human organism would be
useful for delivering small quantities of drugs at the right
place, thus increasing their efficiency and reducing the
possible side effects. To do so, we propose to use the
simplest geometry ever: a hollow sphere. Under pressure,
such a sphere becomes unstable and collapses. While this
instability is generally seen as a mechanical failure, we
use this property to propel the sphere.




 orcid.org/0000-0001-5010-4148
orcid.org/0000-0001-5010-4148